ZLTECH 3ஃபேஸ் 60mm Nema24 24V 100W/200W/300W/400W 3000RPM BLDC மோட்டார்








ஒரு பிரஷ்லெஸ் டிசி எலக்ட்ரிக் மோட்டார் (பிஎல்டிசி) என்பது ஒரு நேரடி மின்னோட்ட மின்னழுத்த விநியோகத்தால் இயக்கப்படும் ஒரு மின்சார மோட்டார் ஆகும், மேலும் வழக்கமான டிசி மோட்டார்களில் உள்ள தூரிகைகளுக்குப் பதிலாக மின்னணு முறையில் மாற்றப்படுகிறது.தற்காலத்தில் வழக்கமான DC மோட்டார்களை விட BLDC மோட்டார்கள் மிகவும் பிரபலமாக உள்ளன, ஆனால் இந்த வகை மோட்டார்களின் வளர்ச்சி 1960 களில் குறைக்கடத்தி எலக்ட்ரானிக்ஸ் உருவாக்கப்பட்டதிலிருந்து மட்டுமே சாத்தியமானது.
ஒற்றுமைகள் BLDC மற்றும் DC மோட்டார்கள்
இரண்டு வகையான மோட்டார்கள் வெளிப்புறத்தில் நிரந்தர காந்தங்கள் அல்லது மின்காந்த சுருள்களைக் கொண்ட ஒரு ஸ்டேட்டரையும், உள்புறத்தில் நேரடி மின்னோட்டத்தால் இயக்கக்கூடிய சுருள் முறுக்குகளைக் கொண்ட ஒரு சுழலியையும் கொண்டுள்ளது.மோட்டார் நேரடி மின்னோட்டத்தால் இயக்கப்படும் போது, ஸ்டேட்டருக்குள் ஒரு காந்தப்புலம் உருவாக்கப்படும், இது ரோட்டரில் உள்ள காந்தங்களை ஈர்க்கும் அல்லது விரட்டும்.இதனால் ரோட்டார் சுழல ஆரம்பிக்கும்.
சுழலி சுழலாமல் இருக்க ஒரு கம்யூடேட்டர் தேவைப்படுகிறது, ஏனென்றால் ஸ்டேட்டரில் உள்ள காந்த சக்திகளுடன் இணைந்திருக்கும் போது ரோட்டார் நின்றுவிடும்.கம்யூடேட்டர் டிசி மின்னோட்டத்தை முறுக்குகள் மூலம் தொடர்ந்து மாற்றுகிறது, இதனால் காந்தப்புலத்தையும் மாற்றுகிறது.இந்த வழியில், மோட்டார் இயக்கப்படும் வரை ரோட்டார் சுழன்று கொண்டே இருக்கும்.
BLDC மற்றும் DC மோட்டார்கள் வேறுபாடுகள்
BLDC மோட்டாருக்கும் வழக்கமான DC மோட்டாருக்கும் இடையே உள்ள மிக முக்கியமான வேறுபாடு கம்யூடேட்டரின் வகையாகும்.ஒரு DC மோட்டார் இந்த நோக்கத்திற்காக கார்பன் தூரிகைகளைப் பயன்படுத்துகிறது.இந்த தூரிகைகளின் தீமை என்னவென்றால், அவை விரைவாக அணிந்துகொள்கின்றன.அதனால்தான் BLDC மோட்டார்கள் சென்சார்களைப் பயன்படுத்துகின்றன - பொதுவாக ஹால் சென்சார்கள் - சுழலியின் நிலையை அளவிடுவதற்கு மற்றும் சுவிட்சாக செயல்படும் சர்க்யூட் போர்டை அளவிடும்.சென்சார்களின் உள்ளீட்டு அளவீடுகள் சர்க்யூட் போர்டு மூலம் செயலாக்கப்படுகிறது, இது ரோட்டார் திரும்பும்போது சரியான நேரத்தில் மாற்றப்படும்.
அளவுருக்கள்
| பொருள் | ZL60DBL100 | ZL60DBL200 | ZL60DBL300 | ZL60DBL400 |
| கட்டம் | 3 கட்டம் | 3 கட்டம் | 3 கட்டம் | 3 கட்டம் |
| அளவு | நேமா24 | நேமா24 | நேமா24 | நேமா24 |
| மின்னழுத்தம் (V) | 24 | 24 | 48 | 48 |
| மதிப்பிடப்பட்ட சக்தி (W) | 100 | 200 | 300 | 400 |
| மதிப்பிடப்பட்ட மின்னோட்டம் (A) | 5.5 | 11.5 | 8.3 | 12 |
| உச்ச மின்னோட்டம் (A) | 16.5 | 34.5 | 25 | 36 |
| மதிப்பிடப்பட்ட முறுக்கு (Nm) | 0.32 | 0.63 | 0.96 | 1.28 |
| உச்ச முறுக்கு (Nm) | 1 | 1.9 | 3 | 3.84 |
| மதிப்பிடப்பட்ட வேகம் (RPM) | 3000 | 3000 | 3000 | 3000 |
| துருவங்களின் எண்ணிக்கை (ஜோடிகள்) | 4 | 4 | 4 | 4 |
| எதிர்ப்பு (Ω) | 0.22 ± 10% | 0.59 ± 10% | 0.24 ± 10% | |
| தூண்டல் (mH) | 0.29 ±20% | 0.73 ± 20% | 0.35 ± 20% | |
| கே (ஆர்எம்எஸ்)(வி/ஆர்பிஎம்) | 4.2x10-3 | 4.2x10-3 | 8.3x10-3 | 8.5x10-3 |
| ரோட்டார் மந்தநிலை (கிலோ.செ.மீ²) | 0.24 | 0.48 | 0.72 | 0.96 |
| முறுக்கு குணகம் (Nm/A) | 0.06 | 0.06 | 0.09 | 0.12 |
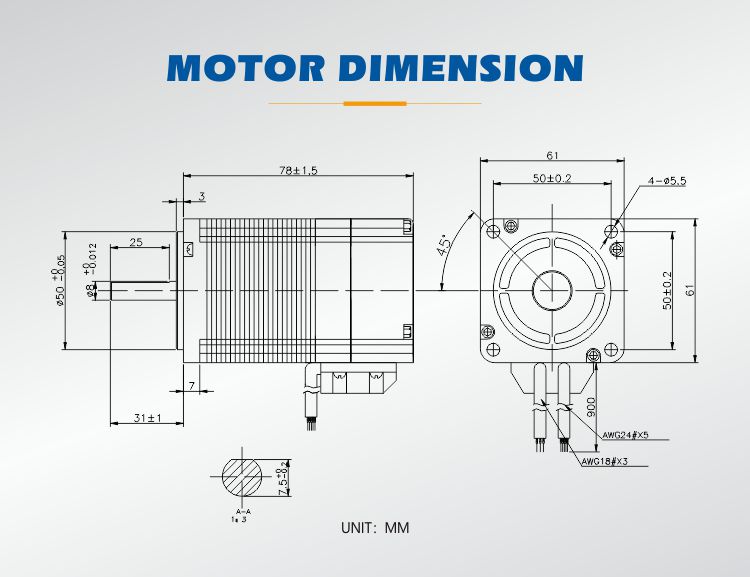
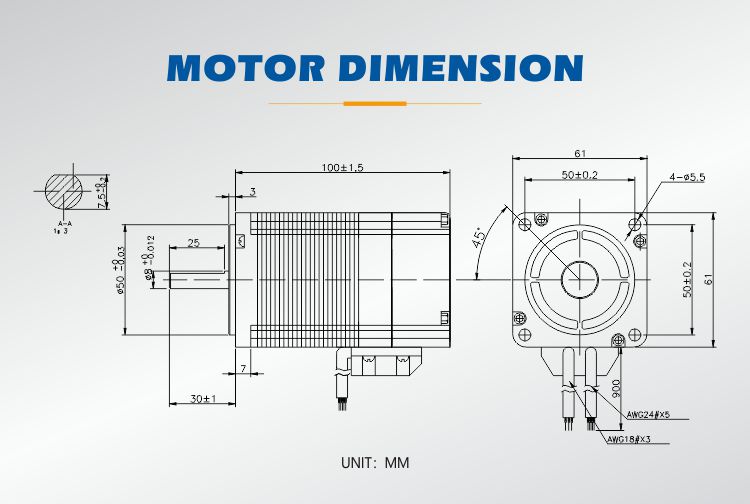
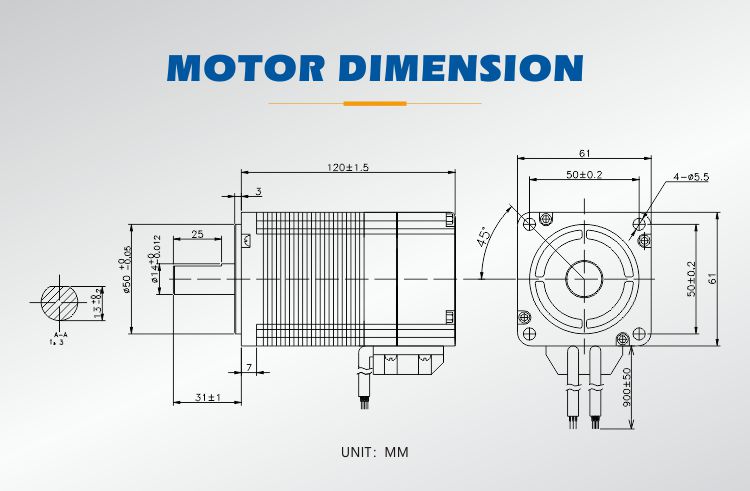
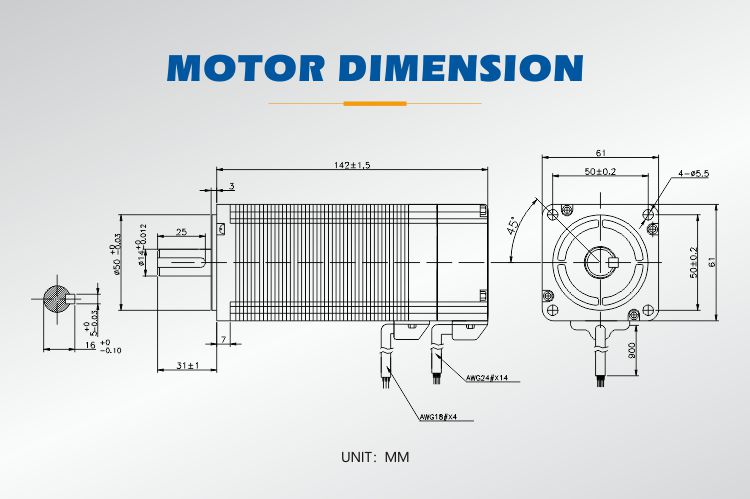
| தண்டு விட்டம் (மிமீ) | 8 | 8 | 14 | 14 |
| தண்டு நீளம் (மிமீ) | 31 | 30 | 31 | 31 |
| மோட்டார் நீளம் (மிமீ) | 78 | 100 | 120 | 142 |
| எடை (கிலோ) | 0.85 | 1.25 | 1.5 | 2.05 |
| தழுவிய BLDC டிரைவர் | ZLDBL5010S | ZLDBL5015 | ZLDBL5010S | ZLDBL5015 |
பரிமாணம்
விண்ணப்பம்

பேக்கிங்

தயாரிப்பு மற்றும் ஆய்வு சாதனம்

தகுதி மற்றும் சான்றிதழ்

அலுவலகம் & தொழிற்சாலை

ஒத்துழைப்பு

தயாரிப்பு வகைகள்
-

DM4022 ZLTECH 24V-50V DC 0.3A-2.2A ஸ்டெப்பர் படி...
-
M4040 ZLTECH 2 கட்ட 12V-40V DC 0.5A-4.0A பிரஷ்...
-

ZLTECH Nema17 0.5/0.7Nm 18V-36V ஒருங்கிணைந்த படி...
-

ZLAC8030L ZLTECH 20V-60V 60A CANOPEN RS485 DC s...
-

ZLTECH 24V-36V 5A DC மின்சார மோட்பஸ் RS485 பிரஸ்...
-

ZLTECH 57mm Nema23 24VDC 1000-wrie மூடப்பட்ட வளைய ...





